The DFR05 is a breakout board for the Microbit the features a dedicated motor board driver which connects using the I2C protocol, meaning that most of the Microbits ports are left free for other purposes, such as for servos or sensors.
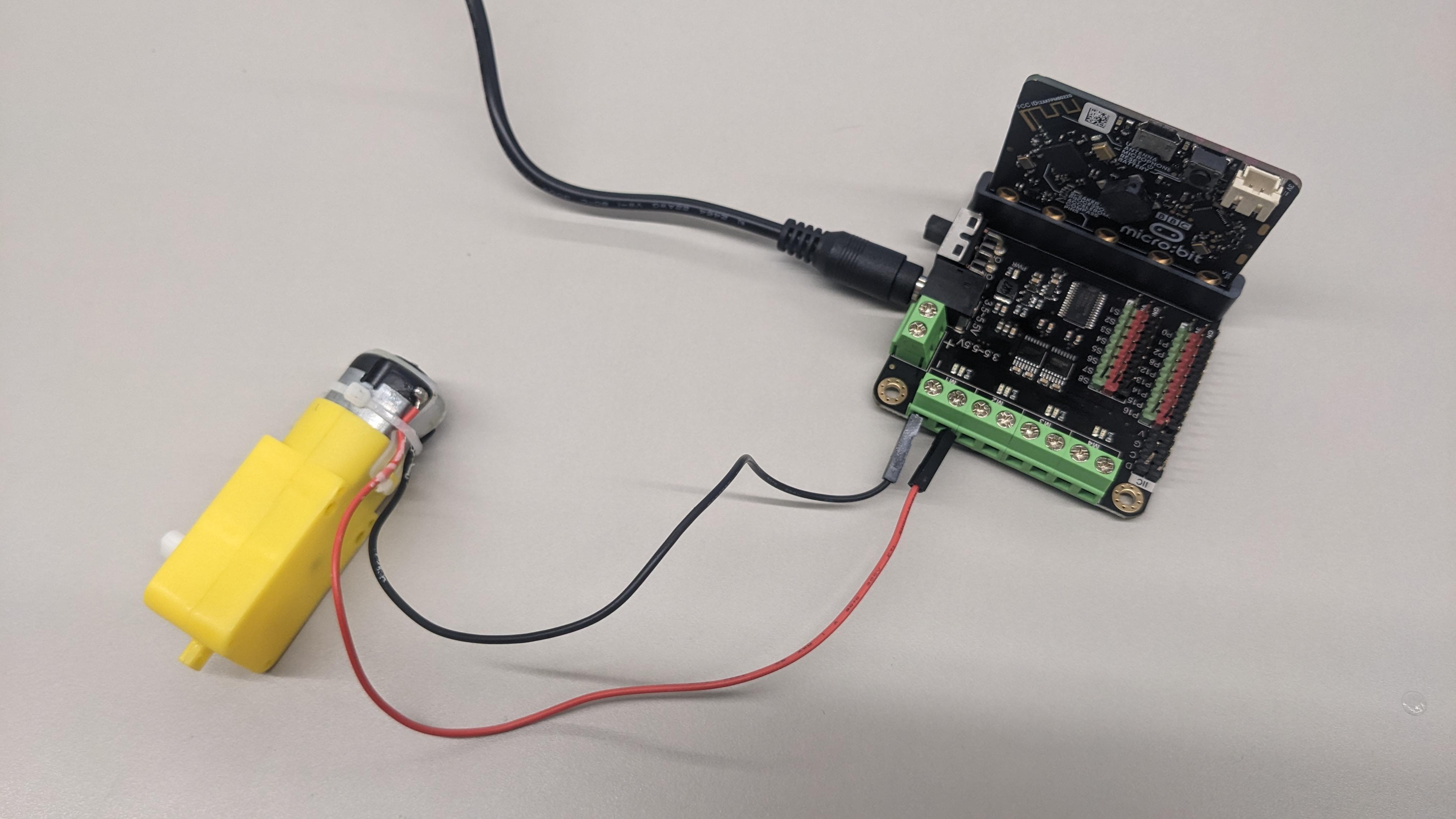
Step 1 – Connect up the hardware
Setting up and coding the DFR05 is pretty straight forward.
Points to note:
- To power the board you need to connect via the round connector on the board, not using the micro-USB connector on the Microbit itself. If it connected correctly the power LED will turn on
- The Microbit buttons need to face out/away from the board.
- There is an in-built power switch, so if the LED doesn’t turn on then check if the switch is turned on.
Coding the board
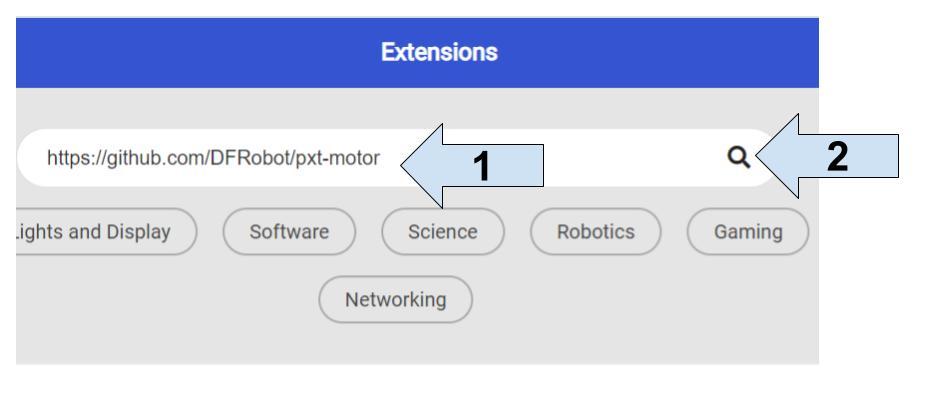
The extension isn’t one of the Microsoft Authorised extensions so you need to paste in the project URL from Github.
1, First go to extensions and paste https://github.com/DFRobot/pxt-motor into the search box
2. Then click the search icon.
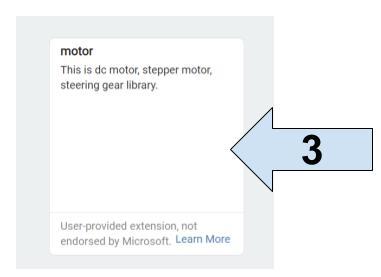
3. Finally click the project link that appears below.
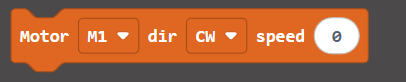
Once this is complete you can code the motorboard using the DF-driver package in the extensions menu.
![]()
For motor control simply use the motor blocks: