- Standard Servos
- Continuous Servos
- Wiring up servos
- Coding: Standard Servos
- Coding: Continuous Servos
- Challenges
What is a standard servo?
A standard servo is a device used to move components by a fixed angle.
- They can only rotate with a fixed angle limit, usually between 90 and 120 degrees
- The analogue value that the servo is given controls what angle the servo is to be set at.
They are commonly used in:
- Radio controlled cars to steer
- Radio controlled planes to set the rudder and wing flaps
What is a continuous servo?
A continuous servo is looks similar to a standard servo, however it doesn’t have a limited range of movement. This means it can used to
- No limited range of movement
- You can control the exact position, only the rotation speed.
Common uses:
- control wheels on robots
- mini winches on models.
Want to to know more about how they work? Take a look at this article.
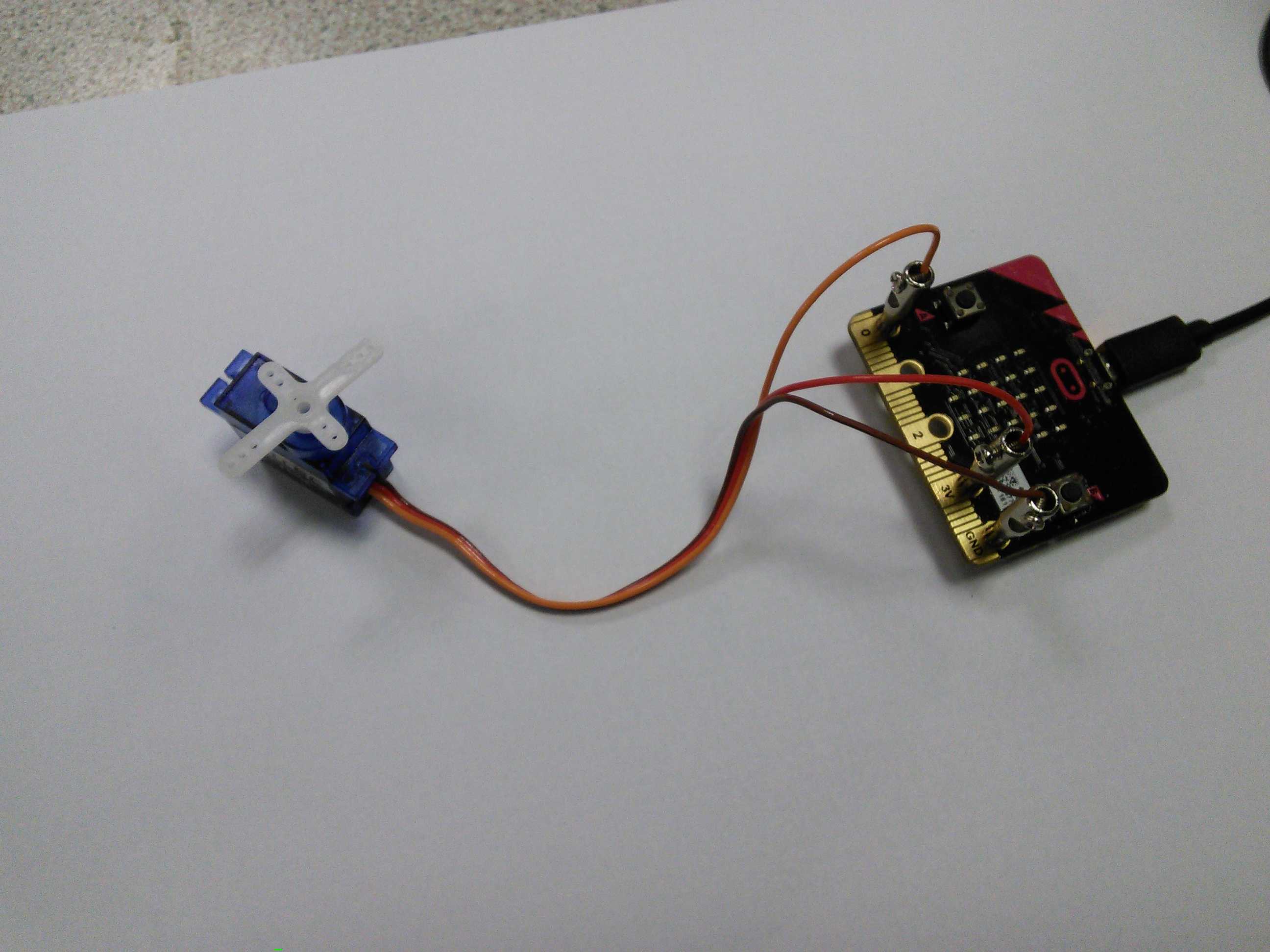
Standard Servos
- White wire – signal wire, connect to GPIO port 0 or 1
- Red wire – 3v wire, connect to 3v on the Microbit
- Black wire – Ground, connect to GND.
Continuous Servos
- Orange – Signal ( Connect to GPIO 0 or 1)
- Red – 3V Input
- Brown/black – Ground GND
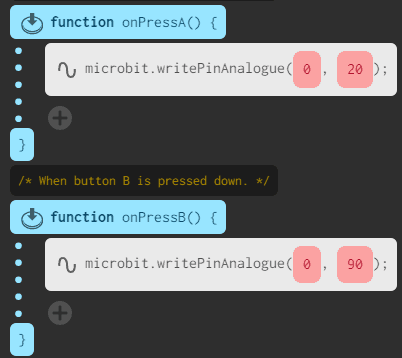
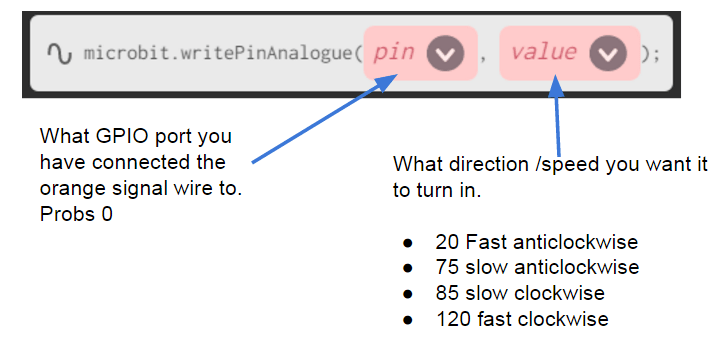
Write analogue out
- 20 farthest turn angle anticlockwise
- 90 farthest turn angle clockwise
Note
These values are approximate through trial and error but they should get you close enough to what you need. Depending on the servo the values might need tweaking for the correct angles – have a play and find out!
The continuous servo, like standard servos, take an analogue value for an input, but this time the value given is used to control the speed and direction, not the position of the arm.
Analogue output
- 20 to 70 Anticlockwise
- 0 Stop
- 80 to 150 Clockwise
Note
These values are approximate through trial and error but they should get you close enough to what you need. Depending on the servo the values might need tweaking if you want to turn at slow or fast speeds!
Challenge -
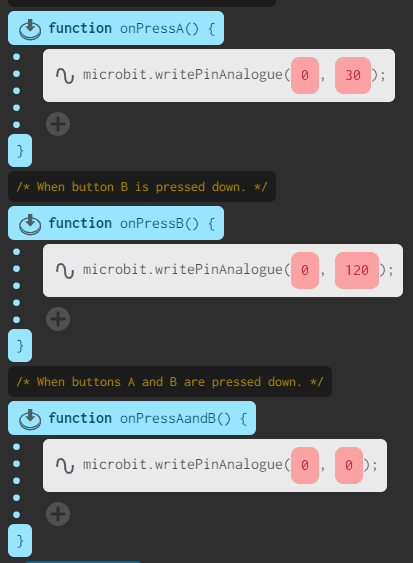
Challenge 28 - Servo direction control
When the A button is pressed:
- spin the motor clockwise
When the B button is pressed
- Spin the motor anticlockwise
When both buttons are pressed:
- Turn off the motor.
Challenge -
Challenge - Tilt the Microbit servo speed control
Get the Microbit to change the speed and direction of the motor, depending on the tilt of the Microbit.
Challenge -
Challenge -